Budget Estimatif à la date du 15/03/14 :
– 1 carte pcDuino V2 à 47,46 € ( 66$) http://store.linksprite.com/pcDuinoV2_47Euros
– 1 webcam 3 axes (PZT) à 17,98 € (25 $) http://store.linksprite.com/webcam3axesPZT
– 1 T-Board à 7,12 € (9.90$) http://store.linksprite.com/t-board-to-bridge-arduino-shield-to-pcduino-with-level-shifter/
– 1 Plate-Forme à 11,69 € (16.25$) http://store.linksprite.com/linkerbot-platform/
– 1 Arduino MotorShield à 9,70 € (13.50$) http://store.linksprite.com/motor-shield/
Soit un total de 93.95 Euros pour un rover Wifi à base de pcDuinoV2 ( DE PLUS , IL Y A UN COUPON DE REDUCTION DE 20% EN CE MOMENT)
A rajouter frais de port : (entre 15 et 20 €)

Introduction
1. Matériel

1.1 Outils nécessaires

1.2 Découverte du matériel
1.2.1 pcDuino
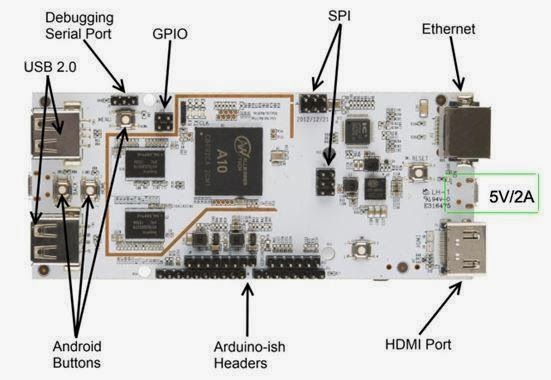
• CPU: core de 1GHz ARM Cortex A8
• GPU: OpenGL ES2.0, OpenVG 1.1 Mali 400 noyau
• DRAM: 1 Go
• le stockage à bord: 2 Go flash, prise microSD extensible jusqu’à 32 Go
• Sortie vidéo: HDMI
• Interface d’extension: 2,54 mm Têtes compatible avec Arduino
• Réseau: Interface RJ45 et USB extensible dongle WiFi (non inclus) (!!La carte pcDuino V2 inclu le WiFi))
• Alimentation: 5V 2A
• Dimension: 125mm X 52mm
• Système d’exploitation: Ubuntu , Android
• API: Toutes les broches extensibles de style Arduino peuvent être accessibles avec l’API, y compris UART, ADC, PWM,GPIO, SPI, I2C
• Langages de programmation: C, C + + avec la chaîne d’outils GNU, Python, Java
1.2.2 caméra vidéo PZT
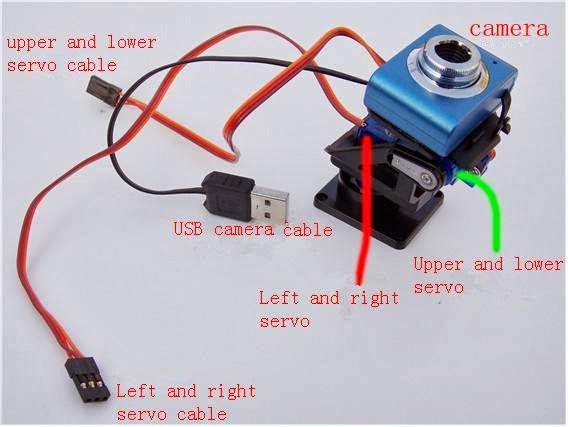
- Pixel: 30W
- Capteur: COMS
- Taille du capteur: 4386 * 3.64 mm
- Résolution maximale: 640 * 480
- Format de l’écran: 26bit RGB
- Interface: interface de transmission à haute vitesse USB2.0, compatible avec USB1.0
- La balance automatique des blancs, la compensation de couleur
1.2.3 Alimentation

Batterie
Une batterie rechargeable de haute capacité au lithium-ion est utilisée.
Veuillez suivre les consignes de sécurité des batteries au lithium pour éviter les accidents. Sa tension d’entrée est 12.6VDC, et la tension de sortie est 12.0VDC évalué à 4800mAh.

Fils, Vis et câbles

Plate-Forme
Tous les principaux accessoires de robots sont installés sur la plate-forme de robot. S’il vous plaît noter que les différents modèles peuvent être différentes dans les images suivantes.

Roulette
Le lanceur supporte l’arrière de la plate-forme du robot. Lors du montage des vis, veillez à ne pas mettre l’écrou sur le côté en dessous. Ceci pourrait affecter la direction de la roulette.

DC motoréducteurs pilotes du robot. (moteurs à courant continu)

Support de montage des moteurs DC
Lors de l’installation, le côté de trois trous est fixé à la plate-forme du robot, le côté avec deux trous est fixé à la moteur-réducteur à courant continu.


Caractéristiques:
• Compatible avec Arduino
• le mode de commande de vitesse de PWM
• Indicateur 4 directions
• Compatible avec Linker Kit 2,54 mm interface du plug terrain de Grove.
• grands modèles de dispositifs de refroidissement
• Soutenir les 14 servos
• Dimensions: 68.5×54.5×29.5 mm
Remarque: Lorsque le courant dépasse 1000mA, la puce du pilote et dissipateur de chaleur seront très chauds.
Tension d’entrée: 12V
Tension de sortie: 5V
Courant de sortie: 2A
 |
|
 |
 |

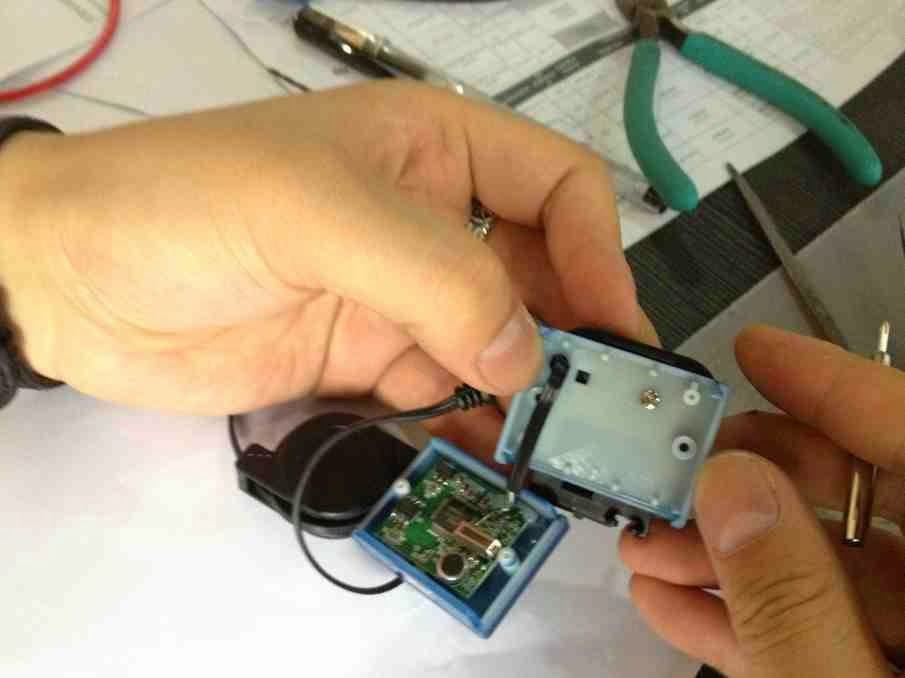
Montage de la caméra PTZ

Étape 2 : Retirez l’aiguille
 |
 |
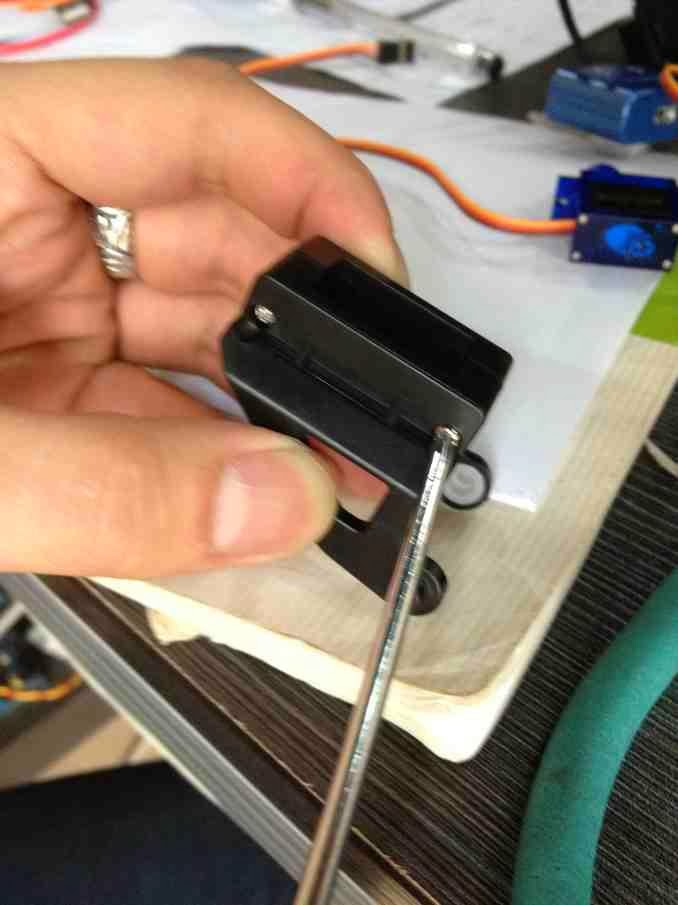
Étape 3: Retirer les vis sur le fond

Étape 4 : Afin de fixer la caméra sur l’appareil , nous avons besoin de percer des trous et utiliser des vis . Nous pouvons couper les deux oreilles sur le fond et obtenir deux trous .
 |
 |
Etape 5: Modifier le montage de la caméra . Coupez les deux anciennes fixations et lisser la surface .
 |
 |
 |
 |
Étape 6 : Aligner la fixation et le bas de l’appareil . Marquez la position du trou avec un stylo ou un crayon , et percer deux trous .
 |
 |
Etape 7: Afin de ne pas bloquer les deux trous déjà sur le fond de l’appareil , percez deux autres trous sur les deux bords de l’appareil.
 |
 |
 |
Étape 8: Mettre le couvercle inférieur de la caméra , et assemblez le dispositif, insérer les vis.

Etape 9: L’appareil est assemblé . Serré avec les vis .
 |
 |
Étape 10 : Installez l’appareil à gouverner . Faites attention de ne pas installer dans la mauvaise direction .
Étape 11 : Installez le support de la tête . Comparer à l’ouverture , si le balancier est trop long , couper la partie excédentaire et serrez avec les vis .
 |
 |

Etape 12: Démonter le support de la tête et installer un autre appareil à gouverner .
 |
 |
 |
Étape 13 : Fixez la caméra à l’appareil PTZ .

Étape 14: Coupez le pied multifonctions de direction et l’installer dans la base .
 |
 |

|
 |
Insérez le support dans la base , serré avec des vis. Ensuite, l’assemblage de la caméra mobile est terminé.
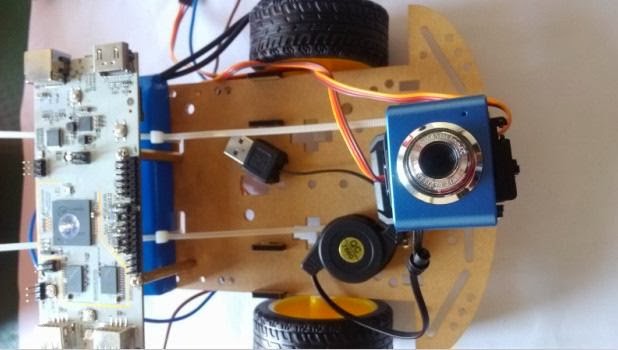
Assemblage de la plate-forme
Étape 1: Installez le moteur à courant continu en position.
La couleur du moteur peut être différente de la couleur du châssis. Première souder les fils du moteur, sans tenir compte de la polarité. Un condensateur céramique de 0,1 uF peut être utilisé s’il est disponible. On peut éviter les interférences etprolonger le cycle de vie du moteur.
Ensuite, installez le support du moteur.
 |
 |
Etape 2: Installation des roulettes.

Étape 3: Installation des roues.
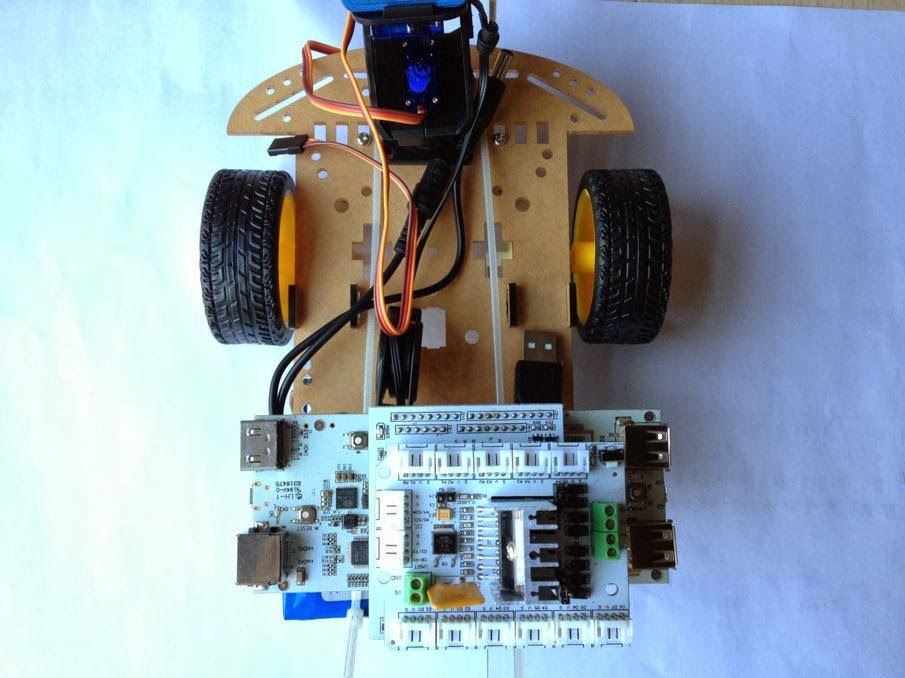
Étape 4: Installer des montants de cuivre qui sont utilisés pour maintenir le panneau de commande.

Étape 5: Fixez le panneau pcDuino au châssis.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Étape 6: Fixez le panneau du module d’alimentation au châssis. S’il vous plaît noter que le module peut être chaud en fonctionnement. Faites donc attention à ne pas toucher avec les mains.
 |
 |
Étape 7: Installez la batterie.

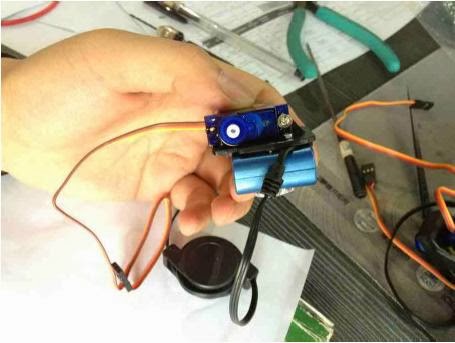
Etape 8: Installez la caméra PTZ.
Étape 9: Installation T-board en bord pcDuino. Il est nécessaire pour le blindage du moteur.

Étape 10: Installez le bouclier de commande de moteur.
Etape 11: Insérez dongle WiFi en pcDuino.
(seulement en cas de pcDuino V1 , la V2 inclu le module WiFi)

Nous y sommes presque!
Instruction de câblage
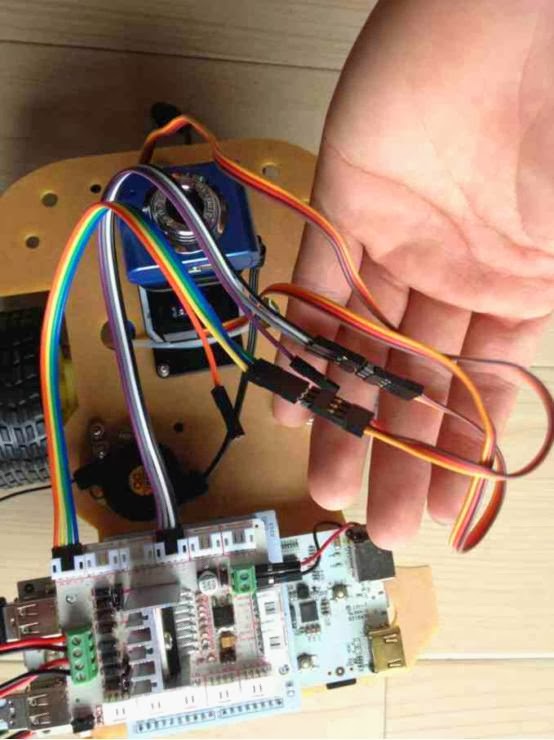
– Rouge (VCC) –> bouclier moteur (VCC)
– Marron (GND) –> bouclier moteur (GND)
– Orange (Control) –> bouclier moteur (D7)Servo dans le sens horizontal pour caméra PZT:
– Rouge (VCC) –> bouclier moteur (VCC)
– Marron (GND) –> bouclier moteur (GND)
– Orange (Control) –> bouclier moteur (D4)Alimentation (12V):
– (1) le bouclier moteur (VCC GND)
– (2) adaptateur (VIN GND)
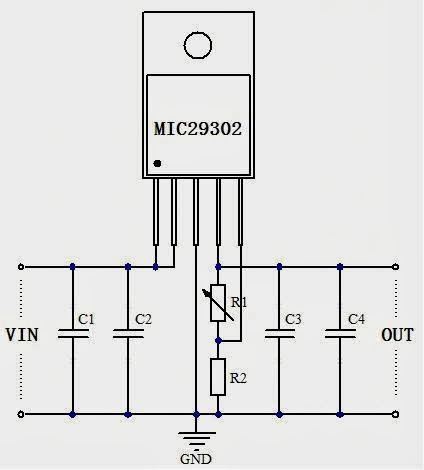
pcDuino alimentation:
Ligne d’alimentation DIY Rouge (VCC) –> OUT
Noir (GND) –> GND
Vous venez de terminer la première partie, la partie matérielle, passons maintenant à la deuxième partie, la partie logicielle :
Leave a Reply
You must be logged in to post a comment.