[vc_row][vc_column width=”1/1″][vc_column_text]
This demo will read the voltage of sliding rheostat and show the value on the terminal.
[/vc_column_text][vc_tour][vc_tab title=”Hardware list” tab_id=”1450922640-1-44″][vc_column_text]
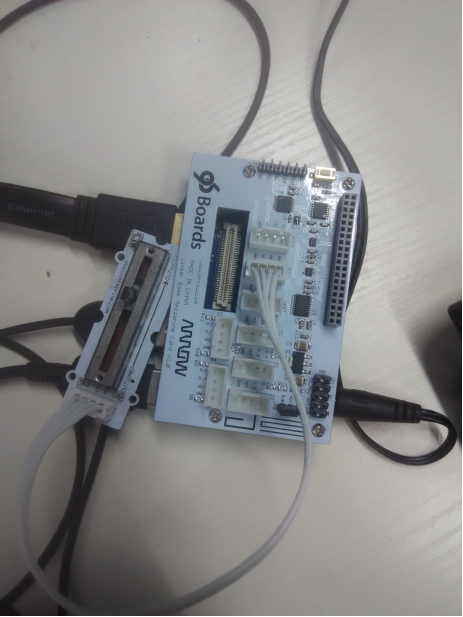
- 96board
- Liner Base Mezzanine Card
- Sliding rheostat module of Linker Kit
- 4-pin cable
[/vc_column_text][/vc_tab][vc_tab title=”Steps” tab_id=”1450922640-2-51″][vc_column_text]
Connect
Connect the sliding rheostat module to ADC1 port on Linker Base Mezzanine Card.
[/vc_column_text][/vc_tab][vc_tab title=”Program” tab_id=”1450922663889-2-7″][vc_column_text]
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <string.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <linux/spi/spidev.h>
#include <linux/types.h>
#include <inttypes.h>
#include "libsoc_spi.h"
#include "libsoc_gpio.h"
#include "libsoc_debug.h"
#define GPIO_CS 18
static uint8_t tx[3],rx[3];
int main()
{
int adc_value;
gpio *gpio_cs;
libsoc_set_debug(0);
gpio_cs = libsoc_gpio_request(GPIO_CS,LS_SHARED);
if(gpio_cs == NULL)
{
goto fail;
}
libsoc_gpio_set_direction(gpio_cs,OUTPUT);
if(libsoc_gpio_get_direction(gpio_cs) != OUTPUT)
{
printf("Failed to set direction to OUTPUT!\n");
goto fail;
}
spi *spi_dev = libsoc_spi_init(32766,0);
if(!spi_dev)
{
printf("Failed to get spidev device!\n");
return EXIT_FAILURE;
}
libsoc_spi_set_mode(spi_dev,MODE_0);
libsoc_spi_get_mode(spi_dev);
libsoc_spi_set_speed(spi_dev,10000);
libsoc_spi_get_speed(spi_dev);
libsoc_spi_set_bits_per_word(spi_dev,BITS_8);
libsoc_spi_get_bits_per_word(spi_dev);
tx[0] = 0x01;
tx[1] = 0x80;
tx[2] = 0x00;
while(1)
{
libsoc_gpio_set_level(gpio_cs,HIGH);
usleep(10);
libsoc_gpio_set_level(gpio_cs,LOW);
libsoc_spi_rw(spi_dev,tx,rx,3);
libsoc_gpio_set_level(gpio_cs,HIGH);
adc_value = (rx[1]<<8)&0b1100000000;
adc_value |= (rx[2]&0xff);
printf("adc_value:%d\n",adc_value);
sleep(1);
}
free:
libsoc_spi_free(spi_dev);
fail:
if(gpio_cs)
{
libsoc_gpio_free(gpio_cs);
}
return EXIT_SUCCESS;
}
Introduce the functions in source code
Function:spi* libsoc_spi_init (uint16_t spidev_device, uint8_t chip_select);
Description:brief opens the spidev character device and intitialises a new spi struct
param uint8_t spidev_device – the major spidev number
param uint8_t spidev_device – the minor spidev number
return spi* struct pointer or NULL on failure
Function:int libsoc_spi_set_mode(spi* spi, spi_mode mode);
Description:fn int libsoc_spi_set_mode(spi* spi, spi_mode mode)
brief sets the spi mode for the spi device
param spi* spi – valid spi struct pointer
param enum spi_mode – valid modes are as follows:-MODE_0, MODE_1, MODE_2, MODE_3
Essential Reading:
– https://www.kernel.org/doc/Documentation/spi/spi-summary
– http://www.diolan.com/dln_doc/spi-transfer-modes.html
– http://blackfin.uclinux.org/doku.php?id=spi
return EXIT_SUCCESS or EXIT_FAILURE
Function:spi_mode libsoc_spi_get_mode(spi* spi);
Description:brief gets the current mode of the spi bus
param spi* spi – valid spi struct pointer
return enum spi_mode – MODE_0/1/2/3 on success, MODE_ERROR on fail
Function:uint32_t libsoc_spi_get_speed(spi* spi);
Description:brief gets the current speed of the spi bus
param spi* spi – valid spi struct pointer
return uint32 – current speed of spi bus in Hz
Function:uint32_t libsoc_spi_get_speed(spi* spi);
Description:brief gets the current speed of the spi bus
param spi* spi – valid spi struct pointer
return uint32 – current speed of spi bus in Hz
Function:int libsoc_spi_set_bits_per_word(spi* spi, spi_bpw bpw);
Description:brief sets the bits per word of the spi transfer, either 8 or 16
param spi* spi – valid spi struct pointer
param enum spi_bpw – bits per word eith BITS_8 or BITS_16
return EXIT_SUCCESS or EXIT_FAILURE
Function:spi_bpw libsoc_spi_get_bits_per_word(spi* spi);
Description:brief gets the current bits per word of the spi bus
param spi* spi – valid spi struct pointer
return enum spi_bpw – BITS_8/16 on success, BITS_ERROR on fail
Function:int libsoc_spi_rw(spi* spi, uint8_t* tx, uint8_t* rx, uint32_t len);
Description:brief duplex read/write to the spi bus, allows writing data and then reading back in one single transaction, or writing and reading at the same time.
param spi* spi – valid spi struct pointer
param uint8_t* tx – array of bytes to send on the bus
param uint8_t* rx – array of bytes to populate with data from the bus param uint32_t len – the length of the transfer in bytes
return EXIT_SUCCESS or EXIT_FAILURE
Function:int libsoc_spi_free(spi* spi);
Description:brief frees the malloced spi struct
param spi* spi – valid spi struct pointer
return EXIT_SUCCESS or EXIT_FAILURE
[/vc_column_text][/vc_tab][vc_tab title=”Compile and run” tab_id=”1450922665028-3-1″][vc_column_text]
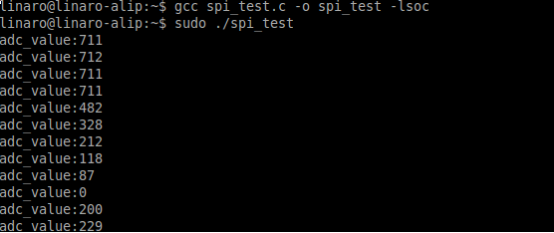
gcc spi_test.c -o spi_test -lsoc sudo ./spi_test
On the terminal, it will print the adc value reading from the voltage of sliding rheostat.
[/vc_column_text][/vc_tab][/vc_tour][/vc_column][/vc_row][vc_row][vc_column width=”1/1″][/vc_column][/vc_row]
Leave a Reply
You must be logged in to post a comment.