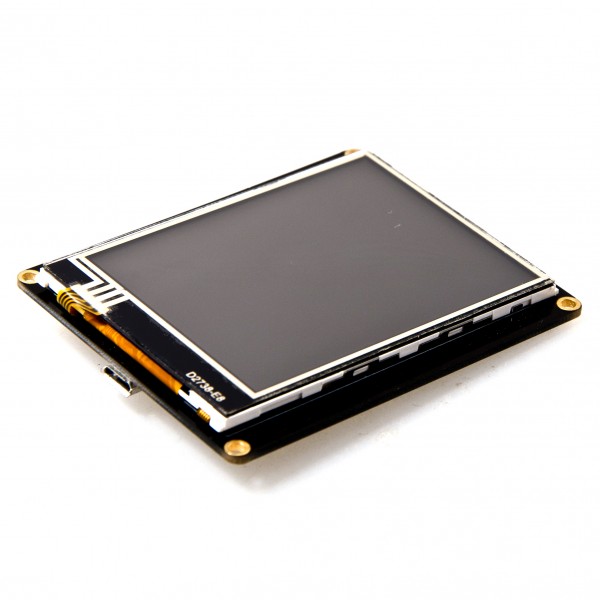
[vc_row][vc_column width=”1/1″][vc_column_text]RoboPeak developed a 2.8″ USB TFT Touch Display Module for SBCs, including pcDuino. In this tutorial, we will look at the steps to use this 2.8″ USB TFT Touch Display module on pcDuino.
[/vc_column_text][vc_tour][vc_tab title=”Specification” tab_id=”1391118186-1-71″][vc_column_text]
- Extensive Device Support
- Standard Device Interface
- Open Source Brings More Possibilities
- Display Resolution: 320×240
- Color Depth: 16bpp
- Screen Size: 2.8 inch
- Communication: USB2.0 Full-Speed
- USB Interface Specifications: Micro-USB
- Touch Screen: Resistive Single Point
- Size: length 74mm, width 60mm
- Weight: 50g
[/vc_column_text][/vc_tab][vc_tab title=”Parts List” tab_id=”1391118186-2-48″][vc_column_text]
- 1 x pcDuino v2
- 1 x 2.8″ USB TFT Touch Display Module
- 1 x Micro USB cable
[/vc_column_text][/vc_tab][vc_tab title=”Steps to Install driver” tab_id=”1391118824282-2-0″][vc_column_text]1. We need to check the kernel version. The current USB display driver can only support version 3.0.8+ and 3.4.29+.
$uname -r

Next, we need to check if the current pcDuino has the dependency kernel modules required by RoboPeakMini USB display. If these files are present, we can continue to configure the driver.
$ ls /lib/modules/`uname -r`/kernel/drivers/video | grep sys
- Sysfillrect.ko
- Syscopyarea.ko
- Sysimgblt.ko
- fb_sys_fops.ko

2. Download the software package:
$ sudo apt-get update
$ git clone https://github.com/robopeak/rpusbdisp.git
If git is not installed, we need to install it first by typing “$sudo apt-get install git”.
After we download the software package, we will get a directory named ‘rpusbdisp” under current directory.

3. Enter directory “rpusbdisp/tools/arm_suite” and execute the script used to install driver:
$cd rpusbdisp/tools/arm_suite
$sudo ./rpusbdisp_arm_tool.sh install_kernel_module

At this step, it will prompt for the board type, we enter ‘pcduino’ and continue:

Next, we move on to configure lightdm server, install Daemon script, and add to the automatically start ‘upstart’, and then we reboot pcDuino:
$sudo ./rpusbdisp_arm_tool.sh auto_load
$sudo reboot
The results:

[/vc_column_text][/vc_tab][vc_tab title=”Calibrate the touch” tab_id=”1391119372100-3-5″][vc_column_text]The following steps are used to calibrate the touch.
1. Make sure that there is no object touching the screen, unplug and plug the micro USB cable. The display module will boot. When the screen shows blue background with RoboPeak logo, we can press the screen until the screen turns black:

2. We will see a blinking red dot on the upper left corner. Follow the instruction there to finish the calibration.

The calibration will be automatically saved.[/vc_column_text][/vc_tab][/vc_tour][/vc_column][/vc_row]
October 9, 2014 at 3:25 am
Hello,
Not work under pcDuino3.
You have a simple procedure to use this tactile screen 2.8″ on him(it) pcDuino3.
Cordially.