LinkSprite GPS shield V2A is designed for Arduino Uno. This shield integrates SR-92 GPS module and a SD card slot. As the SR-92 module and SD works with 3.3V, a 3.3V power supply module is embedded to the shield. This shield can work independently from Arduino, and you can use the PC to receive the data from the board. User can use a serial terminal in PC to read the SR-92 data and read/write to the SD card.
There is a power saving feature of this GPS shield. D6 needs to be pulled down to activate the GPS module.

In this tutorial, we will look at how to use TinyGPS library with GPS V2A shield. TinyGPS library is created by Mikal Hart. We download the TinyGPS library from https://github.com/mikalhart/TinyGPS/releases/tag/v13, and unzip under ‘libraries’. The screen shot is shown blow:
The jumpers of LinkSprite GPS V2A shield should be installed as TX->D2, RX ->D3 :

The main code is shown below:
#include
#include
/* This sample code demonstrates the normal use of a TinyGPS object.
It requires the use of SoftwareSerial, and assumes that you have a
4800-baud serial GPS device hooked up on pins 4(rx) and 3(tx).
*/
TinyGPS gps;
SoftwareSerial ss(2, 3) ;
static void smartdelay(unsigned long ms);
static void print_float(float val, float invalid, int len, int prec);
static void print_int(unsigned long val, unsigned long invalid, int len);
static void print_date(TinyGPS &gps);
static void print_str(const char *str, int len);
void setup()
{
pinMode(6, OUTPUT);
digitalWrite(6, LOW);
Serial.begin(9600);
Serial.print("Testing TinyGPS library v. "); Serial.println(TinyGPS::library_version());
Serial.println("by Mikal Hart");
Serial.println();
Serial.println("Sats HDOP Latitude Longitude Fix Date Time Date Alt Course Speed Card Distance Course Card Chars Sentences Checksum");
Serial.println(" (deg) (deg) Age Age (m) --- from GPS ---- ---- to London ---- RX RX Fail");
Serial.println("-------------------------------------------------------------------------------------------------------------------------------------");
ss.begin(9600);
}
void loop()
{
float flat, flon;
unsigned long age, date, time, chars = 0;
unsigned short sentences = 0, failed = 0;
static const double LONDON_LAT = 51.508131, LONDON_LON = -0.128002;
print_int(gps.satellites(), TinyGPS::GPS_INVALID_SATELLITES, 5);
print_int(gps.hdop(), TinyGPS::GPS_INVALID_HDOP, 5);
gps.f_get_position(&flat, &flon, &age);
print_float(flat, TinyGPS::GPS_INVALID_F_ANGLE, 10, 6);
print_float(flon, TinyGPS::GPS_INVALID_F_ANGLE, 11, 6);
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
print_date(gps);
print_float(gps.f_altitude(), TinyGPS::GPS_INVALID_F_ALTITUDE, 7, 2);
print_float(gps.f_course(), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2);
print_float(gps.f_speed_kmph(), TinyGPS::GPS_INVALID_F_SPEED, 6, 2);
print_str(gps.f_course() == TinyGPS::GPS_INVALID_F_ANGLE ? "*** " : TinyGPS::cardinal(gps.f_course()), 6);
print_int(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0xFFFFFFFF : (unsigned long)TinyGPS::distance_between(flat, flon, LONDON_LAT, LONDON_LON) / 1000, 0xFFFFFFFF, 9);
print_float(flat == TinyGPS::GPS_INVALID_F_ANGLE ? TinyGPS::GPS_INVALID_F_ANGLE : TinyGPS::course_to(flat, flon, LONDON_LAT, LONDON_LON), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2);
print_str(flat == TinyGPS::GPS_INVALID_F_ANGLE ? "*** " : TinyGPS::cardinal(TinyGPS::course_to(flat, flon, LONDON_LAT, LONDON_LON)), 6);
gps.stats(&chars, &sentences, &failed);
print_int(chars, 0xFFFFFFFF, 6);
print_int(sentences, 0xFFFFFFFF, 10);
print_int(failed, 0xFFFFFFFF, 9);
Serial.println();
smartdelay(1000);
}
static void smartdelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (ss.available())
gps.encode(ss.read());
} while (millis() - start < ms); } static void print_float(float val, float invalid, int len, int prec) { if (val == invalid) { while (len-- > 1)
Serial.print('*');
Serial.print(' ');
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1); // . and - flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i=flen; i<len; ++i)
Serial.print(' ');
}
smartdelay(0);
}
static void print_int(unsigned long val, unsigned long invalid, int len)
{
char sz[32];
if (val == invalid)
strcpy(sz, "*******");
else
sprintf(sz, "%ld", val);
sz[len] = 0;
for (int i=strlen(sz); i<len; ++i) sz[i] = ' '; if (len > 0)
sz[len-1] = ' ';
Serial.print(sz);
smartdelay(0);
}
static void print_date(TinyGPS &gps)
{
int year;
byte month, day, hour, minute, second, hundredths;
unsigned long age;
gps.crack_datetime(&year, &month, &day, &hour, &minute, &second, &hundredths, &age);
if (age == TinyGPS::GPS_INVALID_AGE)
Serial.print("********** ******** ");
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d %02d:%02d:%02d ",
month, day, year, hour, minute, second);
Serial.print(sz);
}
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
smartdelay(0);
}
static void print_str(const char *str, int len)
{
int slen = strlen(str);
for (int i=0; i<len; ++i)
Serial.print(ismartdelay(0);
}
The code can also be downloaded from: test_with_gps_device_LinkSpriteGPSV2A.
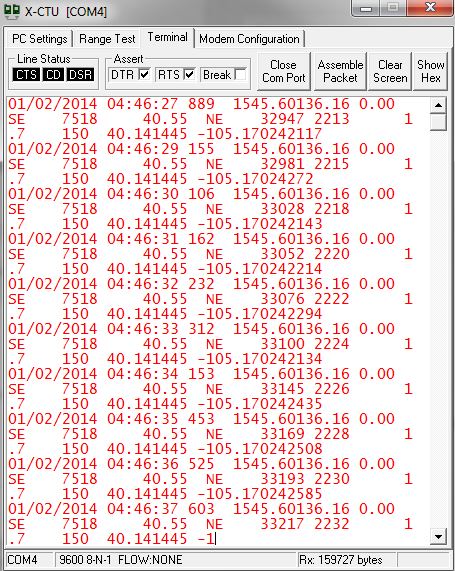
After load the code to Arduino Uno (we may need to unplug GPS v2a shield from Uno during loading), the serial terminal will look something below:
Leave a Reply
You must be logged in to post a comment.