[vc_row][vc_column width=”1/1″][vc_column_text]By Xiaohai Li (haixiaoli@163.com)
Well, it’s my first try on both Kernel 4.x and pcDuino3 Nano. The early idea was from “Linux
on ARM” of eewiki, which used scripts on Robert Nelson’s GitHub to compile kernel for A20-
OLinuXino-LIME platform. Instead of using scripts to automatically build the system, I’d like
to show you each step and how to run Linux on an embedded processor.
- My host platform: Xeon X5650 + Ubuntu MATE 15.10
- Target platform: pcDuino3 Nano Lite (should work for Nano too)
A Linux based software system for ARM usually contains these components:
- Bootloader: U-Boot and a small boot running before it (xloader, boot0, FSBL… could
be close-source) - Kernel: Now 4.x is the mainline version, and 2.x is still widely used. Also large number
of modules, mostly drivers, just to reduce the size of kernel image. - Root File System: Can be built by busybox or buildroot tools, or fetched from
Ubuntu, Debian, Fedora… - You also need a local or cross platform compiler (ARM Linux GCC) to compile all the
software.
[/vc_column_text][vc_tour][vc_tab title=”Cross-compiler: Linaro GCC” tab_id=”1449541536-1-62″][vc_column_text]While we usually use x86 machines for development, to build executable programs on
ARM/Power-PC/MIPS based processor you need a cross compiler. And 64-bit users also need
to install 32-bit libraries for the pre-built compiler.
For Ubuntu 14.04 ~ 15.10 hosts:
sudo apt-get install libc6:i386 libstdc++6:i386 libncurses5:i386 zlib1g:i386
For Debian 7 ~ 9 hosts:
sudo dpkg --add-architecture i386 sudo apt-get install libc6:i386 libstdc++6:i386 libncurses5:i386 zlib1g:i386
Download & extract Linaro GCC tools:
wget -c https://releases.linaro.org/14.09/components/toolchain/binaries/gcc-lin
aro-arm-linux-gnueabihf-4.9-2014.09_linux.tar.xz
tar xf gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux.tar.xz
Set environment variables to define the processor architecture and path to compiler:
cd gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux
export ARCH=arm
export CROSS_COMPILE=${PWD}/bin/arm-linux-gnueabihf-
You can also try other versions of GCC. Download link: http://www.linaro.org/downloads/
[/vc_column_text][/vc_tab][vc_tab title=”Build U-Boot” tab_id=”1449541536-2-62″][vc_column_text]U-Boot, aka Das U-Boot, is short for the Universal Boot Loader. It’s a small program to
initialize the hardware and load operating system like Linux. For more information visit the
website: http://www.denx.de/wiki/U-Boot
Fetch the U-Boot source code and switch to the latest stable branch:
git clone git://git.denx.de/u-boot.git cd u-boot/ git checkout v2015.10
Install libs before configuration & compilation:
sudo apt-get install libncurses5-dev libncursesw5-dev device-tree-compiler u-bo ot-tools
Configure U-Boot with the default settings of Nano, and you can also change the
configuration by with GUI menu:
make distclean make Linksprite_pcDuino3_Nano_defconfig make menuconfig
Compile the U-Boot source code, with ‘-j’ parameter you can choose how many thread you
want to use to speed up the compilation on a multi-core processor. As I have 12-cores in my
X5650:
make -j 12 After compiling you will get an binary file: u-boot-sunxi-with-spl.bin That is the executable UBoot image with Allwinner’s first stage bootloader integrated.
[/vc_column_text][/vc_tab][vc_tab title=”Build Linux Kernel” tab_id=”1449542643835-2-4″][vc_column_text]Fetch stable kernel source from kernel.org:
git clone https://git.kernel.org/pub/scm/linux/kernel/git/stable/linux-stable.g it
Switch to the branch (kernel version) you want.
Kernel 4.3.y:
git checkout linux-4.3.y
Kernel 4.2.y:
git checkout linux-4.2.y
Kernel 4.1.y (it doesn’t contain the dts file for Nano):
git checkout linux-4.1.y
Configure Kernel. The default configuration for Allwinner (sunxi) is a baseline but not good
enough to use. Additional menuconfig is needed to enable basic drivers, such as USB
keyboard/mouse or wireless dongle.
make sunxi_defconfig make menuconfig
I’ve prepared a lite version for Nano, download the latest one:
wget -c https://github.com/nightseas/pcduino3_nano_a20/raw/master/kernel/pcduin o3_nano_config mv pcduino3_nano_config .config make menuconfig
Compile Kernel (zImage), device tree & modules (add ‘-j’ param to speed up):
make zImage make dtbs make modules
Create deploy folder and copy the compiled files:
cp arch/arm/boot/zImage deploy/ cp arch/arm/boot/dts/sun7i-a20-pcduino3-nano.dtb deploy/ make modules_install INSTALL_MOD_PATH=deploy/
[/vc_column_text][/vc_tab][vc_tab title=”Fetch RootFS” tab_id=”1449543021208-3-0″][vc_column_text]
Download pre-built Ubuntu 14.04 image from Linaro (here I choose the DEVELOPER image):
[/vc_column_text][/vc_tab][vc_tab title=”NANO” tab_id=”1449543046778-4-0″][vc_column_text]Description from Linaro: NANO provides a very minimum rootfs that’s contains a fully
function support for apt (the package management system used by Ubuntu). This image only
provides console support, and should be used in case you want a fast and small image to
develop and verify the kernel and system functionality.
wget -c http://releases.linaro.org/14.10/ubuntu/trusty-images/nano/linaro-trust y-nano-20141024-684.tar.gz
[/vc_column_text][/vc_tab][vc_tab title=”DEVELOPER” tab_id=”1449543188875-5-1″][vc_column_text]Description from Linaro: Due demands for a minimum-console based image with extra
developer tools integrated by default, the developer rootfs was created. This image is based
on Nano, but also deploying a working toolchain, debuggers and also additional development
and profiling tools needed by kernel and system developers.
wget -c http://releases.linaro.org/14.10/ubuntu/trusty-images/developer/linarotrusty- developer-20141024-684.tar.gz
[/vc_column_text][/vc_tab][vc_tab title=”ALIP” tab_id=”1449543271740-6-0″][vc_column_text]Description from Linaro: ALIP is a small distribution used for bringing up ARM boards both
by ARM internally and by various customers. Currently ALIP is based on LXDE (Lubuntu),
with lightdm, X11 and chromium as the default graphic applications.
wget -c http://releases.linaro.org/14.10/ubuntu/trusty-images/alip/linaro-trust y-alip-20141024-684.tar.gz
[/vc_column_text][/vc_tab][vc_tab title=”Make A Bootable SD Card” tab_id=”1449543316216-7-5″][vc_column_text]Erase the partition table and boot information on the SD card (change sdX to your SD drive,
like sda. If there is a MMC reader on your host, the drive name may also be mmcblkX):
sudo dd if=/dev/zero of=/dev/sdX bs=1M count=10
Format the disk with GParted or fdisk tool. Here’s a recommended partition table:
Partition Name Format Start Position Size
BOOT fat 1MB 100MB
RootFS ext4 100MB At least 4GB
Write the bootloader to SD card.
sudo dd if=<path to u-boot>/u-boot-sunxi-with-spl.bin of=/dev/sdX bs=1024 seek= 8
Mount partitions:
sudo mkdir -p /media/boot/ sudo mkdir -p /media/rootfs/ sudo mount /dev/sdX1 /media/boot/ sudo mount /dev/sdX2 /media/rootfs/
Copy Kernel image and device tree to boot partition of SD card.
sudo cp -R <path to kernel>/deploy/zImage /media/boot/ sudo cp -R <path to kernel>/deploy/sun7i-a20-pcduino3-nano.dtb /media/boot/
Create a settings file on boot partition:
sudo mkdir -p /media/boot/extlinux/ sudo nano /media/boot/extlinux/extlinux.conf
Add label in extlinux.conf to set the Kernel boot parameters:
label Linux 4.1.13 kernel ../zImage append root=/dev/mmcblk0p2 fdtdir ../
Decompress the root file system to rootfs partition of SD card.
sudo tar xpvf <path to rootfs>/linaro-trusty-developer-20141024-684.tar.gz -C / media/rootfs/ sudo mv /media/rootfs/binary/* /media/rootfs/
Copy modules and firmware built with kernel to lib folder:
sudo cp -R <path to kernel>/deploy/lib/* /media/rootfs/lib/
Edit fstab to mount SD card when Nano boots up.
sudo nano /media/rootfs/etc/fstab
Add these two lines:
/dev/mmcblk0p2 / auto errors=remount-ro 0 1 /dev/mmcblk0p1 /boot auto errors=remount-ro 0 1
Edit network configuration to enable Ethernet and DHCP:
sudo nano /media/rootfs/etc/network/interfaces
Add these lines:
auto lo iface lo inet loopback auto eth0 iface eth0 inet dhcp
The card is ready for use now, umount SD drive.
sudo umount /media/boot/ sudo umount /media/rootfs/
[/vc_column_text][/vc_tab][vc_tab title=”First Boot Up” tab_id=”1449543820812-8-0″][vc_column_text]Insert the SD card to pcDuino3 Nano, and connect 5V/2A USB power, HDMI, Ethernet, USB
keyboard/mouse to Nano. Then there will be boot information showed on the screen, first
from U-Boot, and then Linux. Linux Kernel will load RootFS of Ubuntu at late boot phase.
Finally the software will auto-login as root user. But the default user is Linaro with blank
password. Change your password and update packages.
passwd linaro #( input your password twice) apt-get update apt-get upgrade
So far the Linux 4.x + Ubuntu system is running well, but with an ugly terminal interface if
you choose NANO or DEVELOPER image. Let’s install Lubuntu desktop (about 1.3GB) or
some other GUI desktops online with apt tool.
sudo apt-get install lubuntu-desktop
For other desktops:
sudo apt-get install ubuntu-desktop # Ubuntu Unity sudo apt-get install kubuntu-desktop # Kubuntu
The installation will take hours. Get a cup of coffee and wait. After it’s done, reboot pcDuino
and…
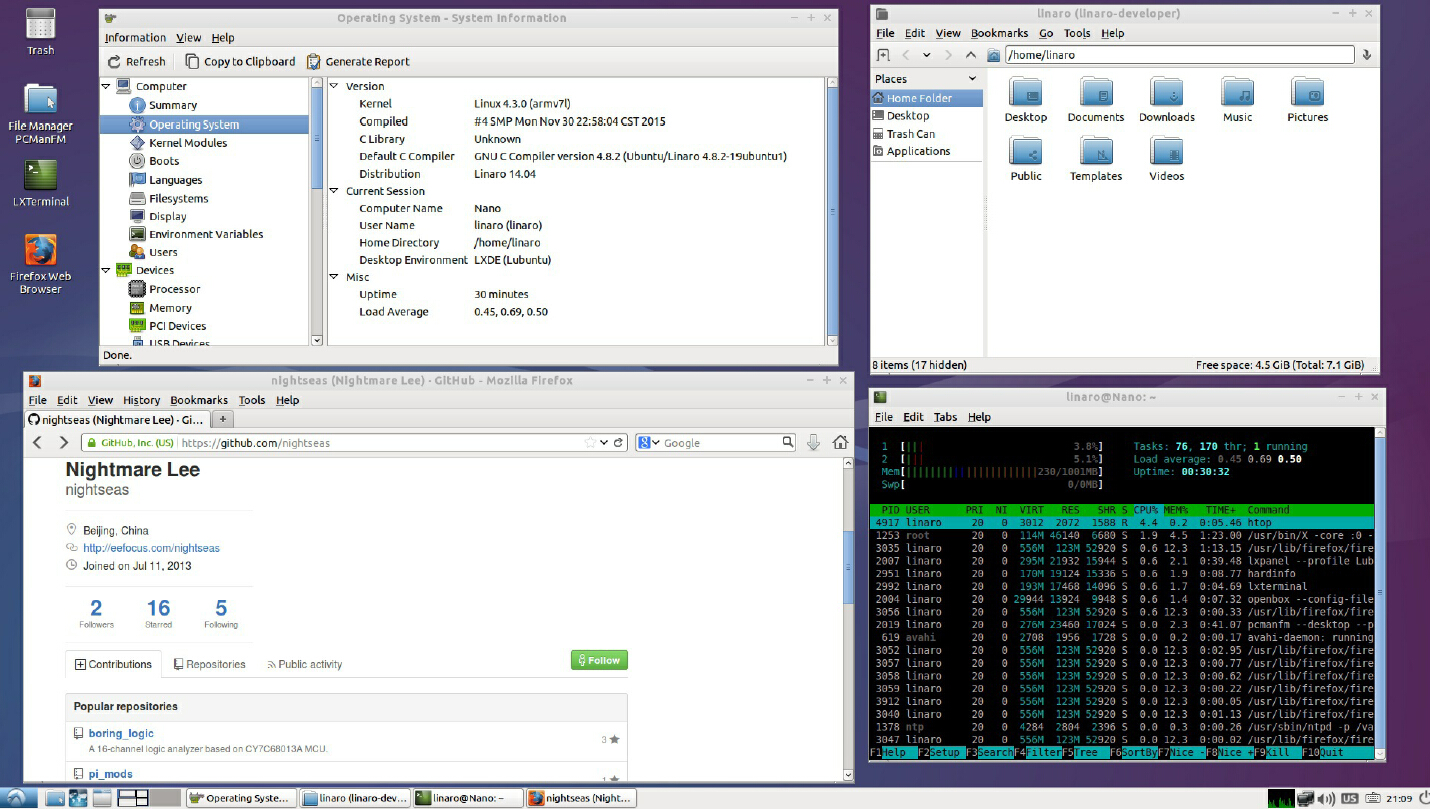
[/vc_column_text][/vc_tab][vc_tab title=”Have fine!” tab_id=”1449543911480-9-9″][vc_column_text]A screenshot of Lubuntu desktop on NANO:
 [/vc_column_text][/vc_tab][/vc_tour][/vc_column][/vc_row][vc_row][vc_column width=”1/1″][/vc_column][/vc_row]
[/vc_column_text][/vc_tab][/vc_tour][/vc_column][/vc_row][vc_row][vc_column width=”1/1″][/vc_column][/vc_row]
Leave a Reply
You must be logged in to post a comment.