The cross compiler has already been prepared for you and can be downloaded from:
http://www.cutedigi.com/bbs/index.php?topic=276.0
The instruction on how to install it can be found at:
http://learn.linksprite.com/?p=470
In this tutorial, we introduce how to make such a cross compiler if you are interested.
First, we need to download the cross compiler from:
http://www.codesourcery.com/sgpp/lite/arm/portal/subscription?@template=lite
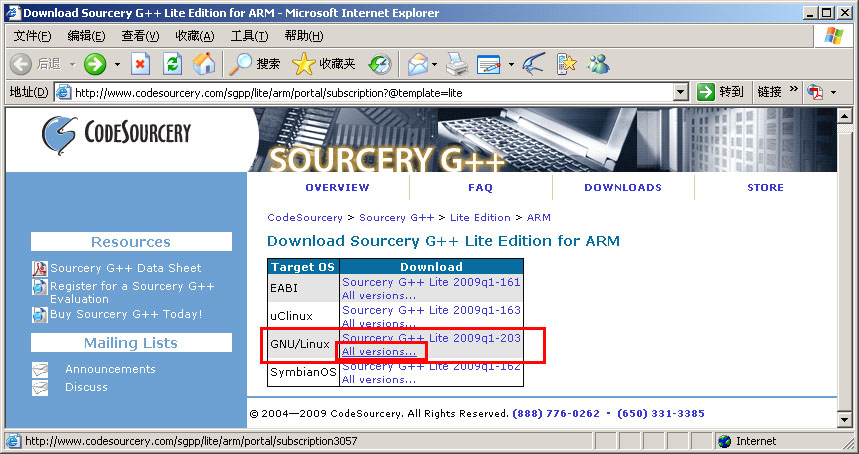
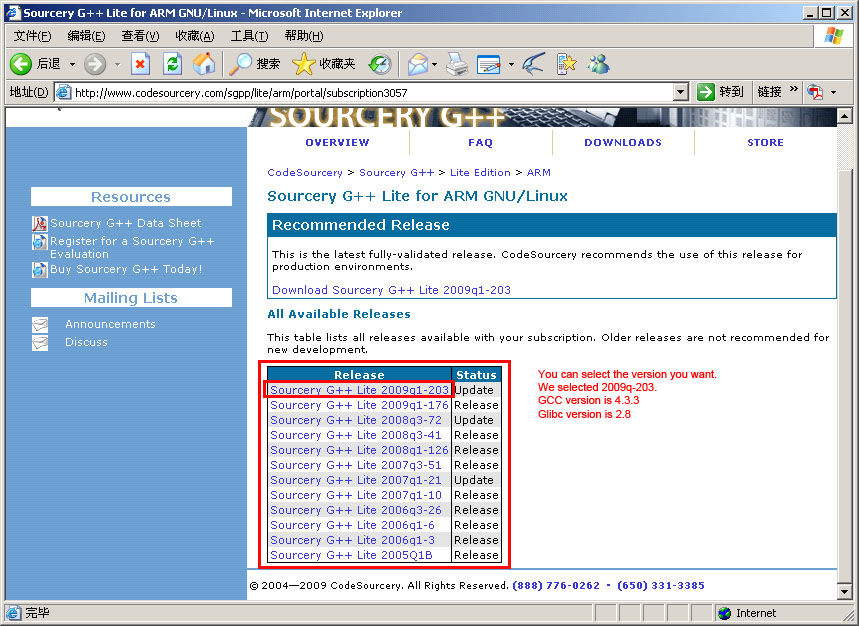

Now, we have downloaded the cross compiler. In the Getting Started Guide, it’s mentioned that this version supports three platforms: ARMv4T, ARMv7, and ARMv5T.
An screen shot is shown below from the PDF.
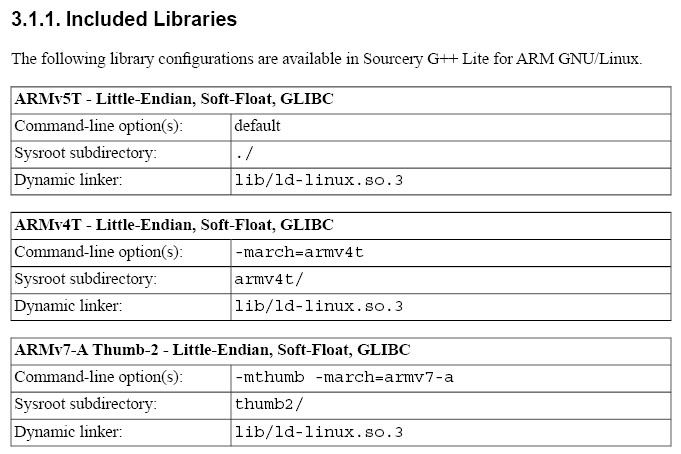
It’s shown above that the default platform is ARMv5T, for S3C2440, we need ARMv4T, what should we do?
We can create seveal run scripts under /bin, and name them as arm-linux-xxx (xxx is the xxx in arm-non-linux-gnueabi-xxx, i.e., gcc, gcc-4.3.3, and g++):
#!/bin/sh
arm-non-linux-gnueabi-xxx -march=armv4t $*
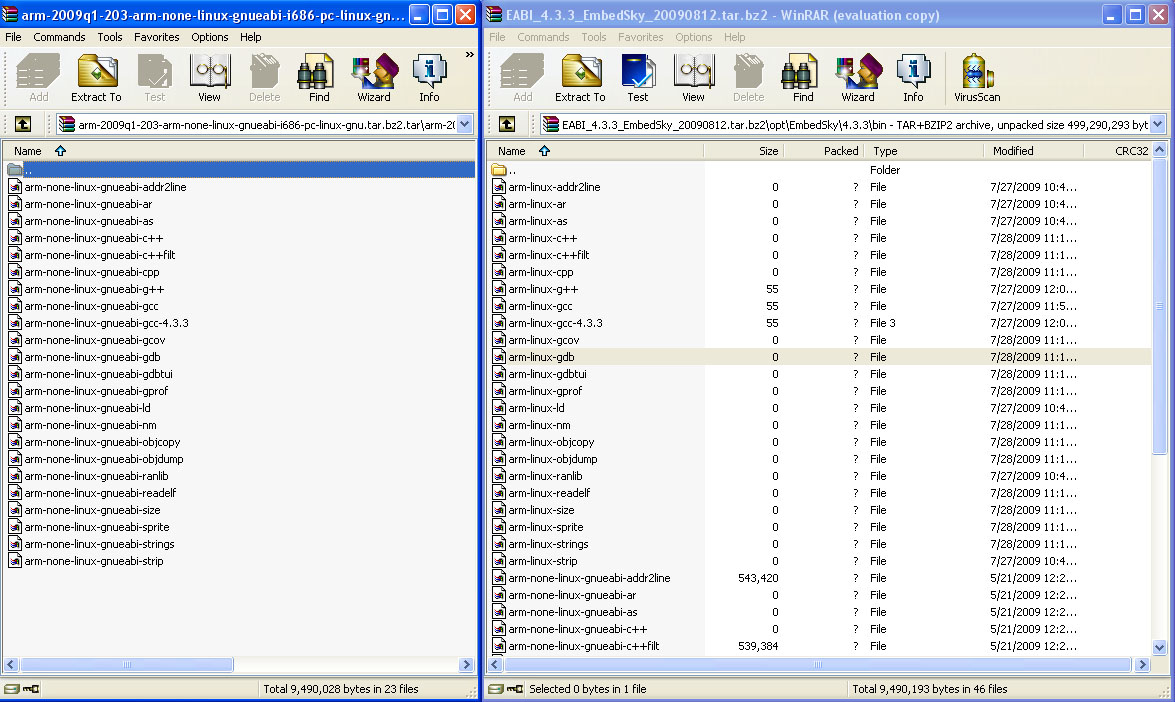
Actually, we only need to make run script for gcc, gcc-4.3.3, and g++. For the rest commands, we can create symbolic link:
#ln -s arm-non-linux-gnueabi-xxx arm-linux-xxx.
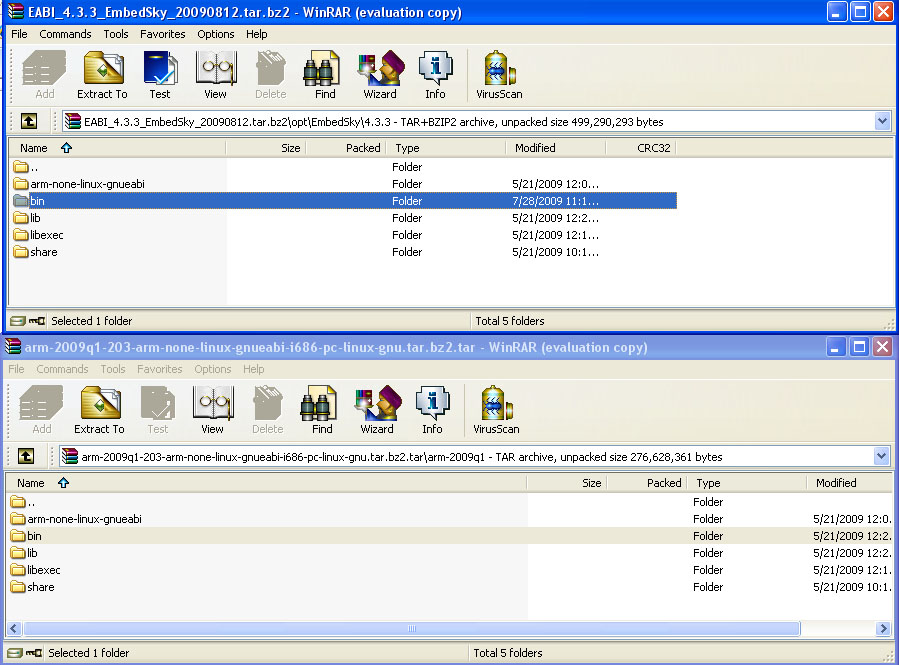
In the following, we can compare the fresh checkout and the cross compiler we provided. You can see that the only difference is the run scripts.
There are two points that we would like to emphasize here for TQ2440 board:
1. The lib path used for cross compiler is: arm-none-linux-gnueabi/libc/armv4t/lib. When we make the file system, we will use the libraries under that path.
2. The header files are udner arm-none-linux-gnueabi/libc/usr/include.
We also will need to add the supporting files when compiling Qt: jpegser.v6b.tar.gz, linpng, libz, and libuuid (e2fprogs), after we ported these files, we copy them to the library path and include path mentioned above.
Leave a Reply
You must be logged in to post a comment.